BEV数据标注
在智能交通和自动驾驶技术的快速发展背景下,数据标注作为其中的重要环节,承担着至关重要的任务。特别是在自动驾驶领域,精准的数据标注为机器学习和深度学习模型的训练提供了必要的基础,使得这些模型能够更加智能地识别道路上的各种物体和环境特征。本文将深入探讨几种常见的数据标注方式,特别是BEV(Bird's Eye View)数据拉框标注、BEV数据接地点标注、环视图标注以及环视图中的车位标注,说明它们的具体内容、应用场景以及在自动驾驶中的重要性。
### 一、BEV数据拉框标注
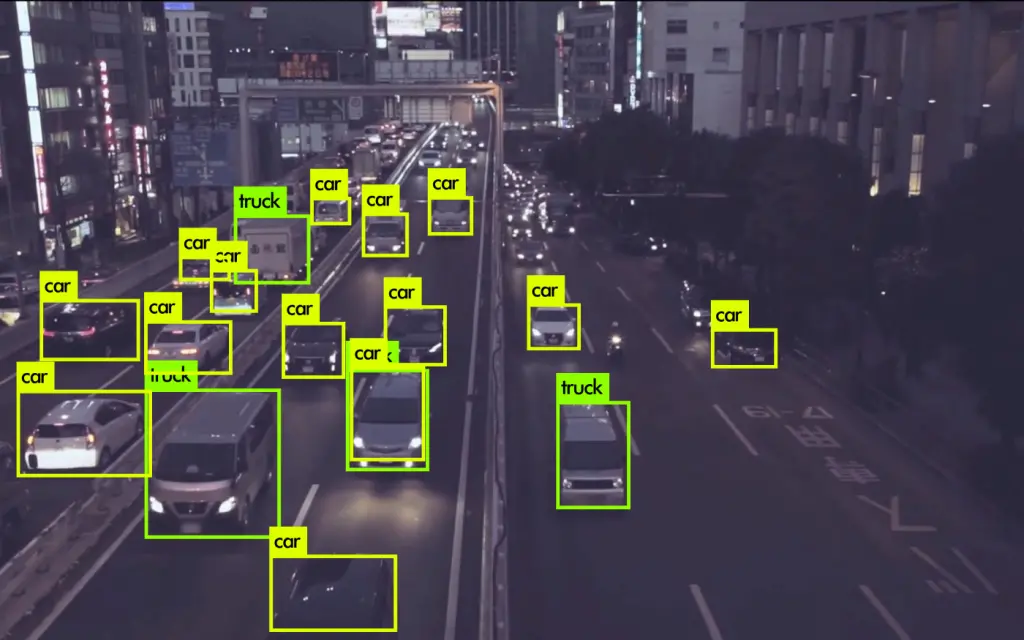
BEV数据拉框标注是一种利用鸟瞰视图对道路场景中的物体进行识别和标注的技术。这种标注方式主要包括对以下几类物体的标注:
- **小汽车和大车**:在BEV图像中,小汽车和大车通常以长方形框标注,通过识别这些框,自动驾驶系统能够准确判断周围是否有其他车辆,从而做出相应的行驶决策。
- **行人**:行人是自动驾驶中必须特别关注的对象,BEV标注允许系统及时识别并评估行人的位置和移动方向,确保行车安全。
- **二三轮车**:这些相对较小的交通工具同样需要标注,以防止在行驶过程中发生碰撞。
- **打开的地锁和杆子**:这些障碍物在道路使用中常见,能对车辆行驶造成直接影响,因此准确标注非常重要。
- **锥桶、垃圾桶、指示牌、方形立柱、圆形立柱**:这些路面标识物体的形状多样,在自动驾驶技术中,识别这些标志意义重大,能够辅助车辆进行导航和规则遵循。
- **树干和举报人脸**:在部分应用场景中,识别树木及其位置也能够帮助判断道路宽度,并进行可行驶区域的判断,而人脸识别则可能用于身份验证等应用。
- **轮胎、消防栓和箱体**:这些物体同样属于道路视觉环境的一部分,及时识别可以减少城市驾驶中的风险。
通过对这些物体的准确标注,自动驾驶系统能够实时感知周围环境,实现对车辆行驶轨迹的精确规划。
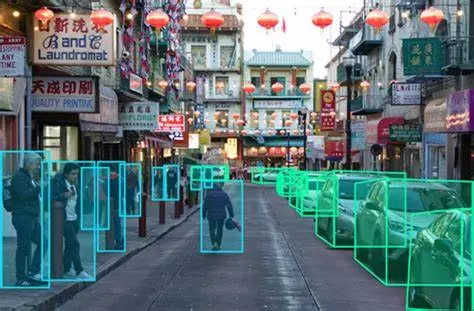
### 二、BEV数据接地点标注
与BEV数据拉框标注相比,BEV数据接地点标注更加注重事物的连接性质。具体而言,在BEV图景中,标注的主要对象包括:
- **车辆**:接地点标注通过识别车辆轮胎与地面的接触点,可以提供车辆的当前位置和动态信息,帮助自动驾驶系统判断其它车辆的行驶轨迹。
- **行人**:类似于车辆,行人的脚步接地点也为系统提供关于他们运动特点的有价值信息。
- **杆子、锥桶、立柱、树干**:这些物体的接地点标注不仅能够用于障碍物的检测,同时可以用于环境的物理特性分析,帮助自动驾驶系统在复杂路况下的安全行驶。
正确的接地点标注有助于提高车辆的环境理解能力,使得自动驾驶更为安全和高效。
### 三、环视图标注
环视图标注技术同样在自动驾驶领域中发挥着重要作用,它提供了车辆周围360度的视觉感知。环视图标注主要包括以下类别:
- **路沿/阶梯**:这些元素的标注帮助车辆判断行驶区域与非行驶区域的界限,避免因越界而导致的事故。
- **墙和围栏**:固定障碍物在视觉中需要标注,以便自动驾驶系统判断可能的撞击风险。
- **车辆和行人**:这些动态物体的检测与识别是确保行车安全的重要组成部分。
- **轮挡和其他**:轮挡的存在帮助确定停车安全性,而其他物体的标注则为全面的环境识别提供了可能。
环视图的全方位特性为实现自动驾驶系统的环境理解奠定了基础。
### 四、环视图中的车位标注
在很多实际场景中,停车位的标注也显得尤为重要。环视图中的车位标注主要包括:
- **角点**:用于标识车位的四个角,帮助系统确定车位的形状和大小,这是智能停车助手或自动泊车系统的关键。
- **车位**:直接标注车位的存在与否,结合地图数据,自动驾驶车辆能够实现自动停车的功能。
通过精确的车位标注,车辆可以自主选择合适的停车位置,极大提高停车的便利性与安全性。
### 结语
在自动驾驶技术的不断发展中,各种类型的数据标注不可或缺地支持了系统的训练和优化。BEV数据拉框标注、接地点标注、环视图标注以及车位标注共同构成了一个完整的数据标注体系,为车辆提供了准确和全面的环境理解能力。这些标注技术的优化最终将促进自动驾驶技术的成熟,让未来的出行更加安全高效。


