检测标注
在现代智能交通系统和自动驾驶技术的迅猛发展中,3D跟踪与物体检测的能力显得尤为重要。特别是在复杂的城市环境中,自动驾驶系统需要准确地识别和跟踪各种动态目标,包括人类、动物、车辆及其他障碍物等。这些目标的实时识别和跟踪不仅影响车辆的安全性和行驶效率,也直接关系到整个交通系统的运行与管理。
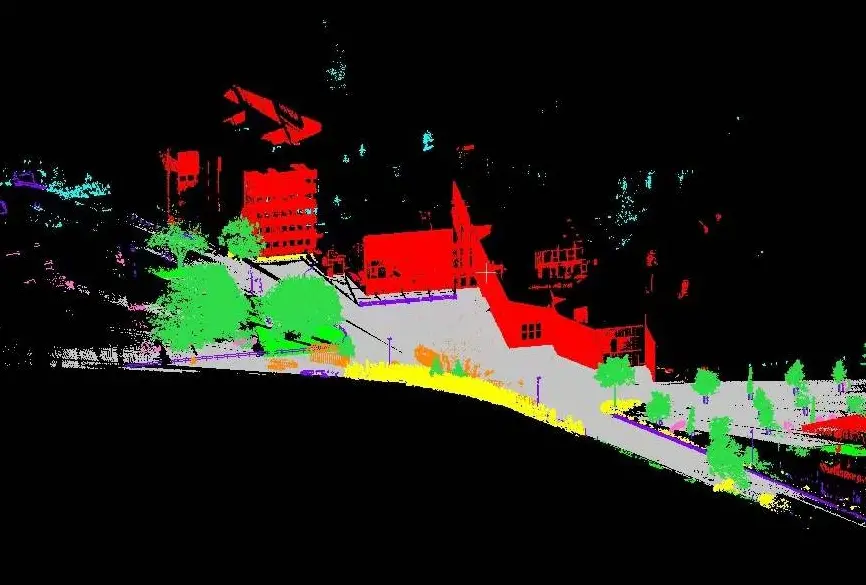
首先,我们可以从连续帧的概念入手。连续帧捕捉技术是指在一定时间间隔内连续记录多个图像帧,这一技术可用于分析和研究运动物体的动态变化。在智能交通中,尤其是在行人附属物、动物、倒影、障碍物等目标的识别方面,连续帧的应用有助于提高检测精度。例如,当行人在过马路时,系统不仅能够通过帧间差异识别出行人的存在,还能够分析行人的运动轨迹。诸如此类的技术支持使得自动驾驶汽车在复杂场景中更具智慧。
在进行目标的3D跟踪标注时,自动驾驶系统需考虑各种目标的特性。人类动作具有高度的不确定性,相较之下,车辆的运动较为规则,而动物的行为则更具随机性。这些差异要求系统具备捕捉和分析多种动态特征的能力。通过对人类、障碍物、可忽略物体(如垃圾、树枝等)、车辆以及倒影与行人附属物的综合分析,系统能够构建一个更加立体的环境认知模型。例如,利用先进的计算机视觉技术,系统可以动态捕捉到行人附属物(如手杖、购物车等)对于行人运动的影响,从而实现更加精准的预测与反应。
此外,3D跟踪标注还涉及到如何处理场景中的倒影及可忽略的对象。在实际应用中,倒影往往会干扰机器视觉系统的判断,因此,如何识别并排除这些伪目标至关重要。系统通过深度学习算法,能够逐步优化其对障碍物及其倒影的处理方式,从而提升整体的目标检测准确性。
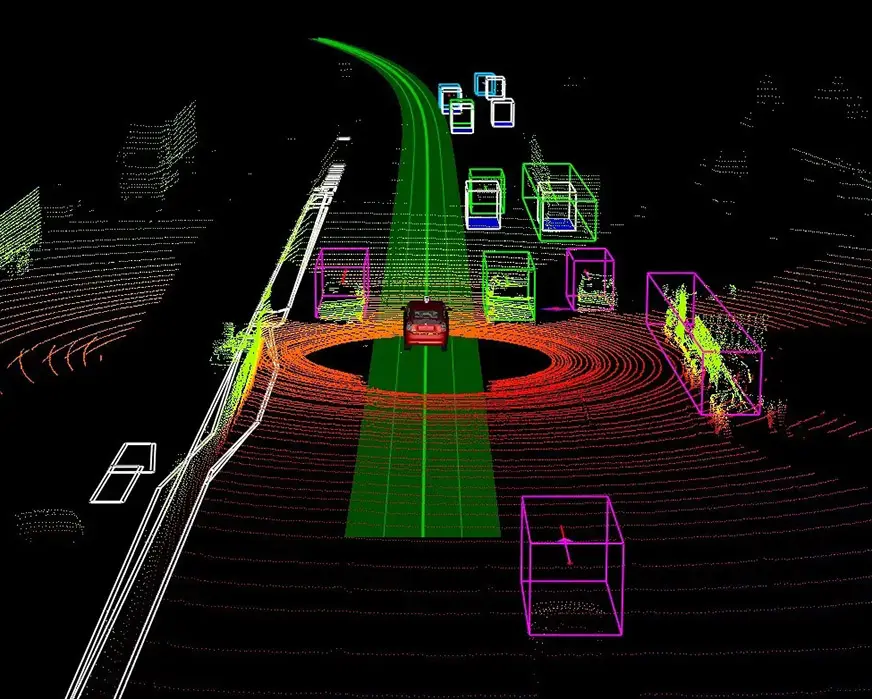
为进一步提高3D跟踪的精度,我们还需要进行补标策略。在补标的过程中,系统不仅要重新标注尚未识别的目标,还要优化已识别目标的检测框。这一过程有助于不断修正和完善目标检测模型,使其在不断变化的环境中保持高效的识别能力。例如,在繁忙的道路上,车辆和行人的交错,使得系统难以一一识别。在这一情况下,补标过程能够通过分析历史数据和环境变化,实时调整和优化目标框的标注。
3D跟踪标注涉及多个要素,其中动物的识别与标注是一个复杂的问题。动物的行为具有更大的不确定性,可能会随时改变方向或者停止。因此,系统需要能够及时捕捉动物的动作模式,并且预测其未来轨迹。同样,行人及其附属物的动态也需要受到关注。例如,一名推着婴儿车的行人,其行为模式与普通行人截然不同,因此,系统需针对不同的附属行人进行特定的跟踪。
为了实现这一目标,智能交通系统需借助多种传感器技术,如相机、激光雷达(LiDAR)、毫米波雷达等。这些传感器可以提供丰富的环境信息,帮助构建三维空间模型,从而实现精确的3D跟踪。结合深度学习与计算机视觉技术,系统能对来自不同传感器的数据进行融合处理,从而提升目标检测的鲁棒性与准确性。
综上所述,3D跟踪标注技术在现代智能交通系统中的应用愈发广泛和重要。通过对人类、动物、车辆及障碍物等不同目标的动态捕捉与跟踪,系统不仅可以提高行车安全性,还可以有效提升交通管理的智能化水平。在未来的发展中,随着技术的不断演进,3D跟踪标注将不断适应更为复杂的交通场景,推动自动驾驶技术向前迈进,为实现智能出行奠定基础。


